如果无人驾驶普及,第一步必然是省了一个司机,但是随着时间的发展,越来越多能自己驾驶的车闲置在车库里,一部分车主就会开始考虑,
可否让它们出去站街拉活?
所以,第二步很多人就会开始共享自己的无人驾驶汽车,让它变成无人驾驶网约车。
作为车主,多了一份收入;
作为汽车,降低了闲置率;
作为乘客,我们发现也许不用买车了,反正召之即来挥之即去,我们和车主其实没啥区别,就差领个证而已。
这个时候,按照闲置率计算,我们会发现我们居然可以省掉一辆车的80%甚至90%的费用,四舍五入不就省掉了一辆车嘛。
而且,我们再也不用面对“考证、维护保养、车祸损失、车位难找”等诸多让人头疼的隐性成本了。
这意味着什么,这意味着率先实现无人驾驶的车企,将可以快速地建立一个无人网约车的网络。
网络越大,服务范围就越大;
车辆越多,响应乘客的速度也就越快,体验也越好;
两单之间无效的寻客里程也就越短,成本自然也就越低。
这和快递网络的原理是一样的。
到了这个阶段,低廉的无人出租车将广泛地替代昂贵的私人拥有车辆,成为社会主流,而私人车辆将成为少数。
在曝光的苹果造车文件里,其实表达了同一个意思:电动车的本质,是出行的革命。好好载客就行。
这种交通出行成本的大幅降低,才是电动车暴击传统车的关键。
所以这轮汽车革命的核心。并不是电动打燃油,而是无人打有人。
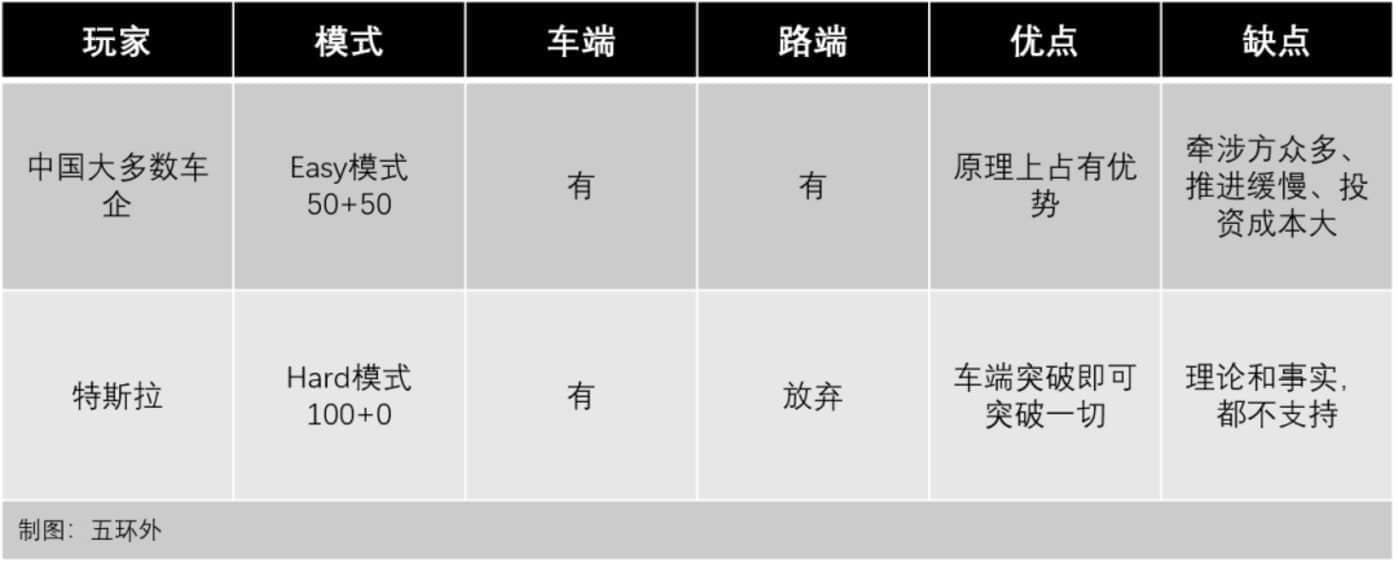
决战:特斯拉VS中国, 谁会赢?
无人驾驶这场决战,正好美中又选了两个不同的路线,
单车智能 VS车路协同。
目前主流是前者,因为特斯拉在这个路线上似乎推进得已经非常成功了,尤其是加上它的品牌定位和高科技形象,大家都认为这条路线的成功,似乎近在咫尺,胜利在望。
相反,车路协同却感觉举步维艰:需要改造全国的道路,需要统一技术规范,需要路端网络全国联通,几乎是天量的工作和困难。
路线之争,似乎胜败分明了。但,事实真的如此吗?
马斯克极度推崇第一性原理,即一切从物理学原理出发,底层原理才是决定性的力量。
所以,让我们先从最底层的数学入手,做一道数学题。
以考试为例,100分的卷子,从10分进步到20分很容易,从50到60就难了不少,要想从95到100就几乎不可能了。它是一个如下图所示的难度曲线:
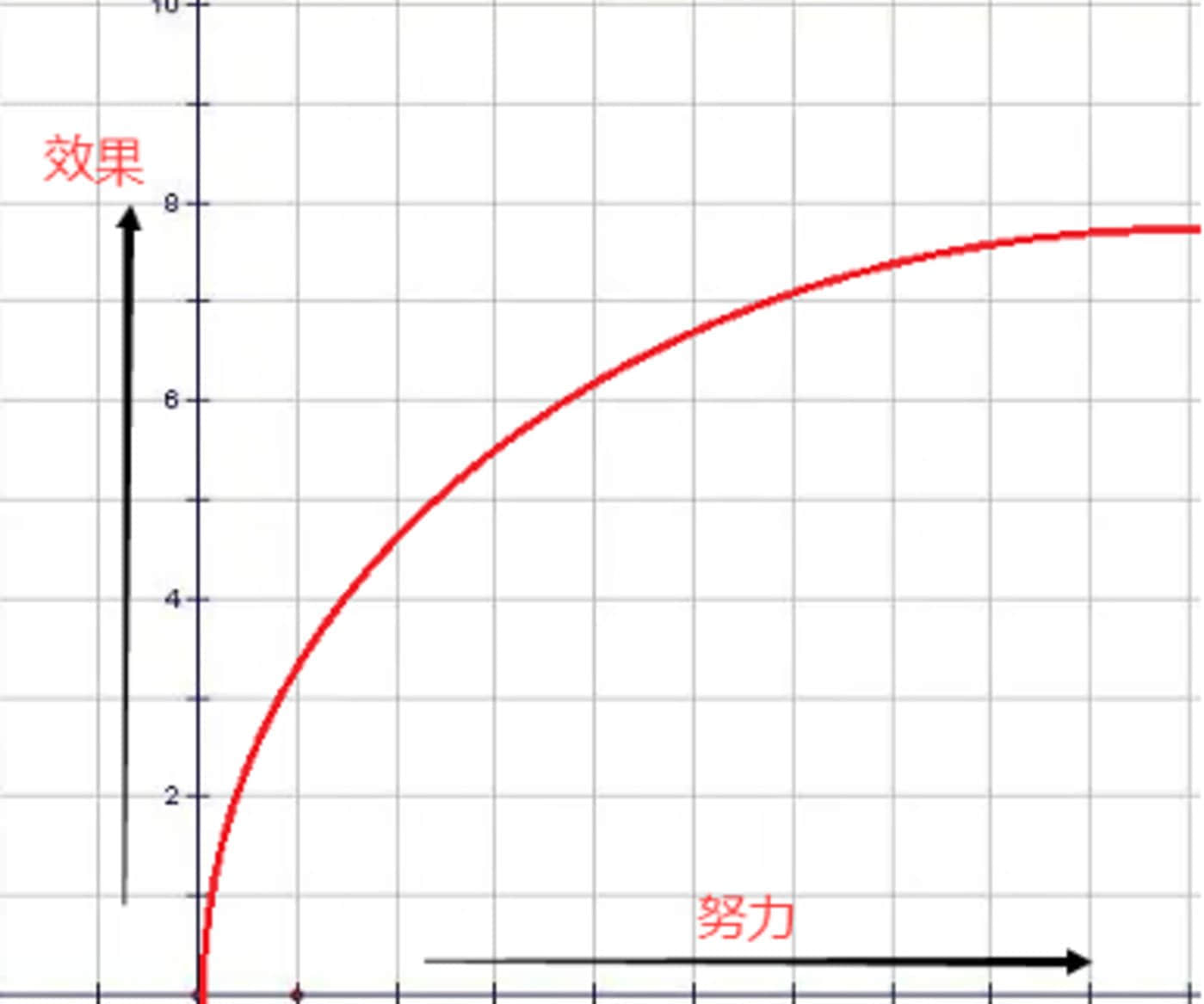
这个曲线,其实生活中处处可见,车端不断改进智能,就符合这条难度曲线,路端其实也一样符合。
所以单独发展其中任何一端,最终的结果就是偏瘫。要达到同样的智能驾驶水平,只有双向奔赴才最轻松,才是真正的爱情。
也就是说,50+50>100+0。其实,这就是一个非常简单的“双变量之和求极值”的高中数学题。
最重要的是,无论车端如何发展迅猛、无论路端如何困难重重,它都永远摆脱不了难度曲线这个规律。
只要数学原理没变,就可以从理论上证明,车路协同路线一定优于单车智能路线。
事实上,不仅是理论层面,历史也反复证明了这一点。
当初美国并不是造出一个可以适用于一切路面的火车,而是付出了大量残酷的代价,建设了几十万公里的铁路系统,专为火车服务。也就是说,既用了钢铁车轮,又用了万里铁轨。
火车+铁轨,整个作为一套交通系统。如果单独改进车轮即可,他们为何要投入这么巨大的代价,做这种双向努力呢。
人类并不是在车轮上装一个超级减震系统,让汽车可以无视一切地形随意驰骋,而是用海量的水泥钢筋,在全球铺设了接近1亿公里的道路,专为车辆服务。也就是说,既在车轮装减震器,又让道路变得平整。
汽车+公路,整个作为一套交通系统。如果单独改造减震系统即可,各国政府为何会投入巨大的资源,做这种双向努力呢。
现有公路交通并不是一味地把司机培养到眼观六路、耳听八方,各个都变成舒马赫,自由穿梭于各个十字路口,而是同时改造道路,比如划出行道线、设立交通灯、颁布交规等等。也就是说,既改造路,又改造司机。
司机+道路,整个作为一套交通指挥体系,相互适应。这又是双向努力。
交通史的变革,不仅仅是改造车,还有改造路
这些案例告诉我们,单向努力困难太大,双向努力才是经过百年事实检验过的正确路线。
所以,综合上述的理论和事实,无人驾驶最终很大可能,也是用“车端+路端”这样的车路协同模式,来实现全球交通革命。
但,现实真的是按照这样的预想发展的吗?可惜,并不是。
中国的烦恼:打特斯拉的武器怎么不行呢?
目前,国内车路协同的发展并不尽如人意,其实这并不是技术问题,而是一个商业问题。
在我们的设想里,路端实际应该是“无人驾驶基站+多个感知设备”组成的一套系统,其中感知设备可以是摄像头、激光雷达、毫米波雷达等,它们如同电子眼、监控和路灯一样,悬挂在道路上方。
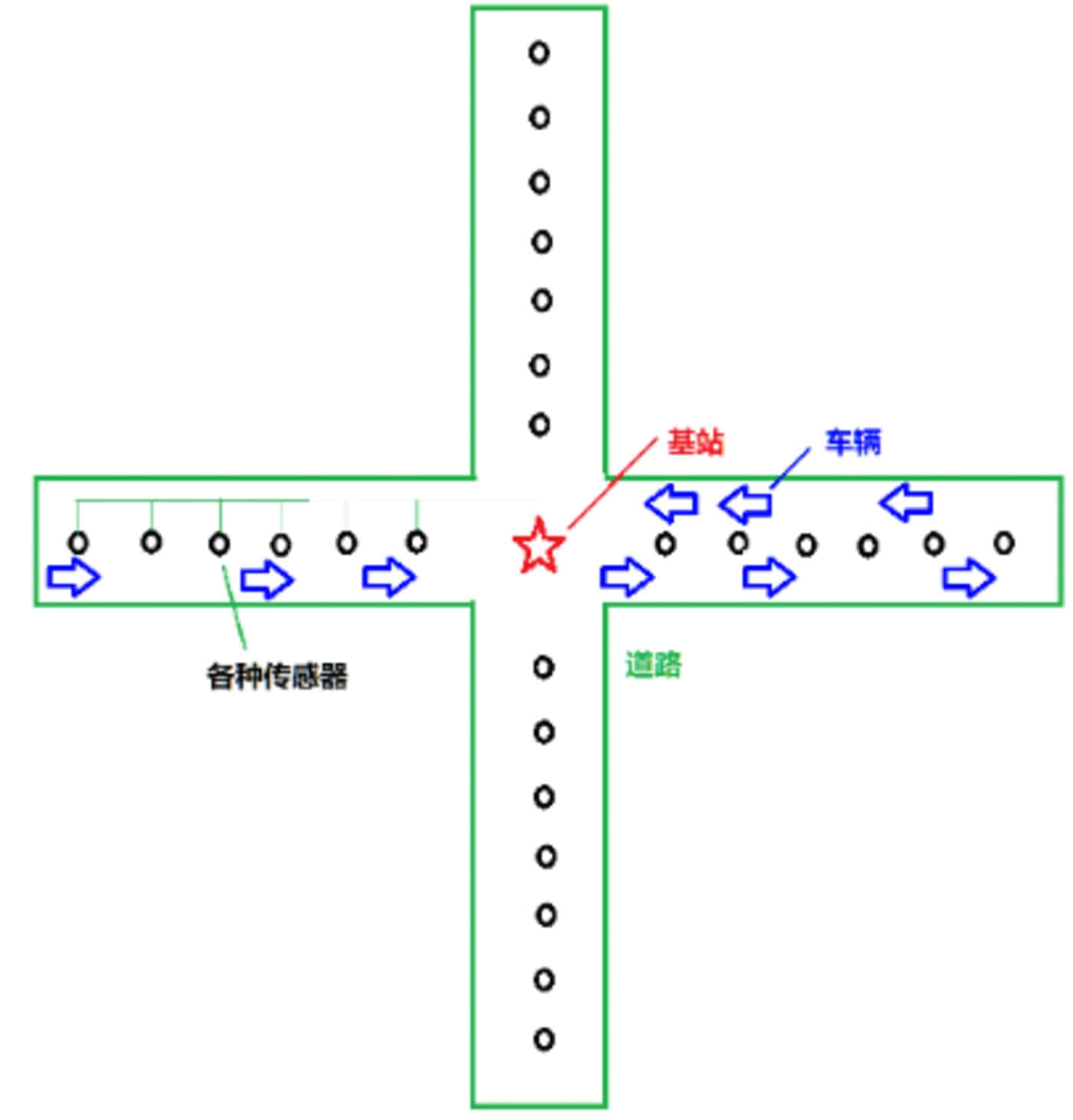
当我们沿路铺设这样海量的路端系统,就等于给了车端安装了一个上帝视角,可以把更远的车辆信息提前提供给车端,“更远和提前”这两大优势,将会给无人驾驶极大的加分。
但是,路端也有路端的甜蜜和烦恼。
让车端和路端琴瑟和谐,才是正缘。
相关阅读 >>
更多相关阅读请进入《特斯拉》频道 >>