本文摘自太平洋电脑网,原文地址:https://news.pconline.com.cn/1455/14550864.html,侵删。
软体机器人的前沿科学家团队,仍然致力于从动物王国中寻找灵感,比如像蚱蜢和蚯蚓那样移动。 本文要为大家介绍的,则是格拉斯哥大学的一支研究团队刚刚分享的一种受蠕虫启发的机器人。 在一些新颖的传感器技术的加持下,它能够更好地“感知”躯体的位置、进而向前移动。
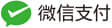
研究配图 - 1:具有无缝嵌入式传感器的仿生蚯蚓 / 尺蠖概念图
研究人员指出,得益于灵活的电子设备和简短的传感器,这些具有弹性的新型机器人能够更好地穿过狭窄空间。
此前,我们已经见到过其它一些受蠕虫和爬虫启发的软体机器人,比如使用人造肌肉在地板上爬行的 Meshworm,以及挖掘地表土壤的农业应用类机器人。
不过来自格拉斯哥大学的工程师们,却通过模仿所谓的生物体感(proprioception)功能,让软体机器人开辟了空间感知的新领域。
研究人员指出,此前这项能力从未在软体机器人上得到实证,因其需要创造性地将必要的电子设备和传感器组合到一起。
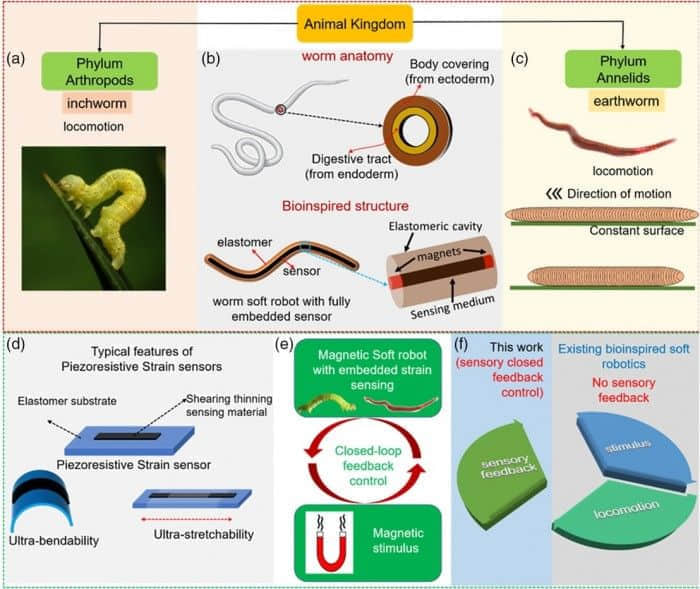
研究配图 - 2:动态应变响应电阻的 0~200% 受控拉伸
据悉,机器人外部皮肤由名为 Ecoflex 的弹性塑料、以及研究团队开发的新型石墨糊制成,并在身体两端嵌入了约 4.5 厘米(1.7 英寸)长的微型磁铁。
石墨糊带有电阻,且会随着机器人身体的拉伸而变化。而内置于体内的应变传感器,又能够测量这些变化、并检测其何时达到预设值。
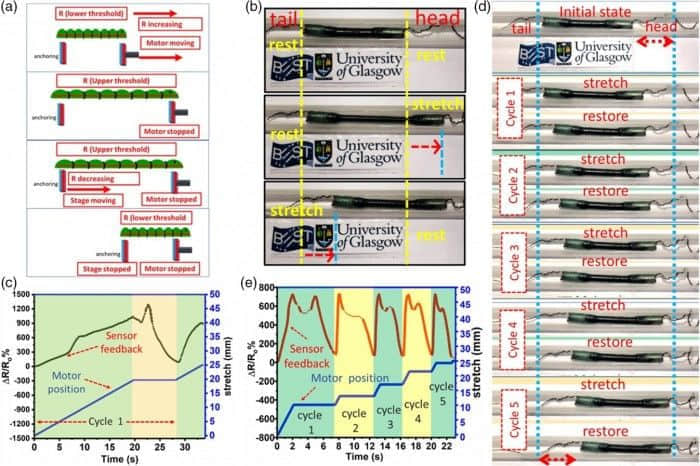
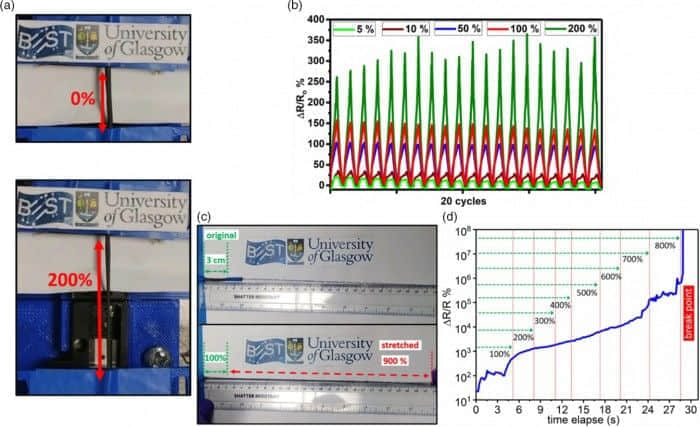
研究配图 - 3:蚯蚓软体机器人的运动模式
在需要前进的时候,软体机器人能够收缩身体、以沿着金属表面向前移动。带领这项研究的 Ravinder Dahiya 教授称:
本体感知是许多生物的一项重要特征,科学家们受其长期启发,并试图打造能够模仿这一能力的工程系统。 我们的仿生机器人,也是朝着打造柔软、灵活的机器人系统而前进,并期望能够实现类似自然界的无限运动方向。 展望未来,这类软体机器人可通过无缝的嵌入拉伸来感知周围环境,并帮助人在具有挑战性的环境中实现更有效的导航(比如灾后救援)、或研发出更真实的义肢。
有关这项研究的详情,已经发表在近日出版的《先进智能系统》( Advanced Intelligent Systems )期刊上。
相关阅读 >>
三星odyssey ark曲面显示器预售 55英寸售2.4万元
采用ltpo oled技术的ipad pro可能在2023年亮相
更多相关阅读请进入《新闻资讯》频道 >>